
The Device Chronicle interviewed Christoph Tietz, Manager, Connectivity, V2X and Digital Environment Software, Autonomous mobility Systems at ZF Friedrichshafen AG (ZF) on the role of OTA software updates in autonomous guided vehicles.
Christoph leads the team that manages software connectivity and the digital environment which covers the development of the HD maps that are required to support autonomous driving. Christoph explains that ZF is a classic tier 1 automotive supplier with over 100 years of rich heritage in mechanical engineering such as developing steering, gearboxes, and driveline components such as dampers, clutches. Through the decades, these automotive components have been getting electrified and electronic components have been added to control them. In the last number of years, Christoph says this has intensified to the point where software now plays a huge role in the development and ongoing management of these automotive components.

Software defined components for Autonomous guided vehicles
ZF supplies all these components that are now defined by software to all vehicle segments including commercial vehicles such as trucks and buses, passenger cars through the large OEMs, agricultural machinery and transport vehicles in industrial applications. “Almost anything that has wheels is the focus for the company. It is therefore quite natural to take the components we have developed off the shelf and put them into vehicles that ZF develops itself and these are specifically autonomous vehicles.
In this new category of autonomous vehicles, Christoph’s group looks after the hardware components and the software that is related to this hardware, culminating in the development of an AD system that can be integrated into the vehicles. Christoph explains that the AD system is applied to shuttle vehicles for passenger transportation and the typical use case scenario would be last mile transportation or an additional layer of public transport service that many large cities are looking for so that use of private vehicles can be reduced in city centers. This is a strong market focus for ZF.
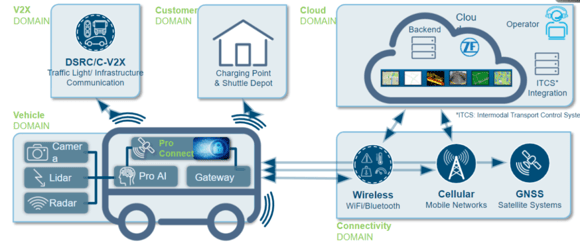
Sensors, radar, Lidar and more in Autonomous guided vehicles
Within these autonomous guided vehicles, a lot of sensors are required such as radar-based and Lidar-based cameras, and tremendous computing power is needed to process all the sensor data, to control the vehicle, and the high degree of connectivity that such a vehicle requires. There is no traditional driver on board so everything has to be handled and managed by the vehicle itself and this involves interacting with road infrastructure and the environment, providing an operator with a complete view into the vehicle.
All the components in these autonomous guided vehicles are highly dependent on software and this makes distributing and updating software a key consideration especially in the beginning, there is a high demand for fast feature updating capabilities in the field.
Shuttles – a use case in autonomous guided vehicles
The current generation GRT Shuttle has a range of 50Km, a top speed of 42Km per hour, sports an 85Kw engine, and can carry up to 12 passengers. Christoph says the next generation of shuttle will have a mass market distribution. All the ECUs need to be linked and connected within these vehicles for performing diagnostics, software updating, and getting a sense of the general state of the vehicle and to provide it with directions from the operator. These directions include where the vehicle should go, what schedule it should follow and so on. The vehicle also has a requirement for intensive infrastructure communication including battery charging infrastructure in the depots, and also wireless communication via Cellular, GNSS Satellite and wi-fi bluetooth short range communication. 5G cellular is a technology for this use case given the broad range of data that has to be exchanged with the vehicle and this requires strong bandwidth and precise location tracking.
“All these elements conclude in the cloud environment that hosts all these services that are needed to allow the end customers (operators) the capabilities to be able to manage and monitor the vehicle and also serve as an integration point for public transport companies which already have control center infrastructure in place. These autonomous vehicle fleets have to integrate into those environments. “Overall it is quite a complex ecosystem.”
Development of software stack for Autonomous guided vehicles through partnerships
Christoph stresses that creating such an ecosystem is only possible through working with partners. This is key as not everything can be done by ZF alone. Different technology layers and elements are relied upon. At the bottom, the cloud infrastructure comes from players such as AWS, Azure and Google Cloud in the West. In China, there are specific alternatives such as TenCent, so there should be no tight coupling to one over the other. The product must be agnostic and must be able to run with different cloud environments. Christoph says that it is a key design principle to have the key functionalities cloud agnostic.
On the second layer, Christoph and his team rely on containerisation services from the likes of RedHat OpenShift and Docker, the third layer is traditional storage types such as MongoDB, Postgresql and Hashicorp Vault. Just below the top layer is the layer with the IoT services including Mender which updates the system OS of the embedded hardware and the software services in the field. The top layer are the services in the vehicle including Live HD maps, system diagnostics, the human machine interface, the fleet management, vehicle remote operations, V2X services, connectivity orchestration, mobile applications and engineering services.
Importance of OTA software updates in Autonomous guided vehicles
Christoph explains the key considerations for OTA software updates for these vehicles in the field. These vehicles have lots of embedded devices and typically one gateway device that has connectivity to the outside world. The software components within the vehicle have to be a compatible set and this is required for homologation and road approvals. There also needs to be strict control over who can use a field update service so the right users need to have the right roles and levels of access. Automotive regulations such as UNECE R 156 and ISO 240849 have to be considered; and a high level of artifact encryption for IP protection and obfuscation is also needed. “We do not want these vehicles to be hijacked from the outside.”
Power of Mender for OTA software updates
The team uses a Yocto-based Linux environment for their IoT gateways, everything needs to be portable with a micro-services architecture and multi-tenant set up so that these things can be offered to ZF’s end customers. Mender covered the needs as a nice fit with the capabilities to model complex update modules, provide delta updates to save bandwidth for software image deployment, off the shelf Yocto meta layer support, remote maintenance and configuration of the edge device and a device centric web GUI. Mender follows ZF’s philosophy for open source and micro-services architecture, and is very strong when it comes to integration through a RESTful API. It was fast to get set up and integrated into a self hosted environment. Critically it really helps with time to market, you must be fast and deliver a high quality product based on software, get the software fast on the road, the ability to ship out software to the field and support in the test and development phase was a remarkable result from Mender.
We wish Christoph and the team at ZF well as they continue their journey of digital innovation.