
The Device Chronicle spoke to Kristian Binder and Felix Steinle from EKU Power Drives about start stop systems, IoT and OTA software updates.
These connected start stop systems optimise the fuel consumption and CO 2 emissions from heavy duty off-road mobile machinery used in energy production. The company has an interesting background and stumbled on its flagship product of start stop systems through determined innovation and investigation of the underserved desired outcomes in the market. Felix starts by explaining the background to EKU Power Drives. In 2009, the founders of EKU Power Drives Edward Eichstetter, Manuel Klein, and Leonardo Uriona made their names by engineering the fastest accelerating electric car, it recorded a speed of 0-100Km acceleration in 2.681 seconds.
Start stop systems for efficiency
The founders put their engineering nous into addressing optimisation in the energy sector. They wanted to make large energy intensive processes more efficient. They tried to solve problems associated with the use of oversized diesel engines used in the oil and gas industry for well completion. These machines were oversized so therefore they over consumed the fuel needed to complete the task. The idea was to replace the diesel engine with a smaller natural gas engine and build a hybrid with an electric motor and lithium-ion battery.
The company now focuses on increasing the flexibility, sustainability and efficiency of heavy duty off-road mobile machinery. In order to offer a better solution as the diesel engine, engineers in the company started developing a dedicated natural gas engine hybrid concept. This would replace the diesel engine and offer a cleaner, and more energy and cost-efficient solution. “Idle time reduction is a big part of the savings and during downtime we pivot the first product strategy and take the idle management part and offer it also for the diesel engines. There was an opportunity there to automatically switch off the engine saving fuel and CO 2 emissions.”
Start stop systems are normal in automotive
This opportunity was inspired by what the EKU Power Drives team saw in the automotive start stop systems. Kristian explains “It is normal in automotive to have start/stop systems such as when you stop an automobile, a traffic light the engine switch off.” The team took this idea and transferred it to large diesel engines in trucks in the oil and gas industry that are used for well preparation. They found the use case could also be adapted to other sectors such as mining and marine. KU Power Drives was up and running!
Start stop systems bring huge savings
EKU Power Drives found in the telemetry system that with these large machines, between 0.5 and 2 tons of C0 2 could be saved per machine per day in emissions, depending on the use case by using an automated start/stop mechanism. Kristian describes this as a longer term saving on primary energy in fuel costs and engine maintenance where the systems could be used for longer before maintenance would be required. Kristian states “If you have 30% less operation hours, 30% longer life time of the system before you have to maintain it. The typical service intervals of these engines are oil changes every 250 hours and major maintenance every 1000 hours or up to 4 times per year. In summary, maintenance costs of each unit can reach 300,000 per year. Since the OPH reduction system prolongs the service intervals, this is one of the biggest cost savers for clients. There was also the very valuable benefit of green energy efficiency.
Start stop systems in a diverse Integration environment
The start stop systems are integrated into a range of different vehicles in the field and the systems that are supported are diverse and the machine configurations can be very different in each case. Kristian continues “There are different engine manufacturers, different transmissions and different PLCs to integrate with, so the starting point is the data to find out how is the system working? How is the electrical wiring done? What are the states the unit will be? What are the key signals that can be got from CanBus J1939 embedded bus mechanism? And so on.
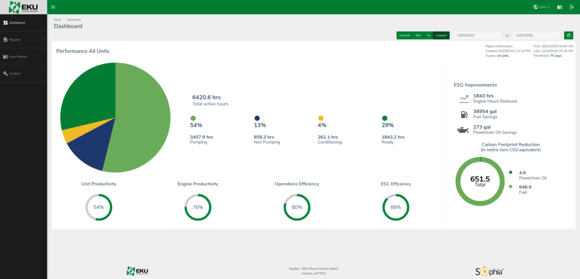
The company also uses off-the-shelf loggers, these are actually offline devices. One of the use-cases of our own “Edge Node” device, currently in development, will be to act as a Bus logger and connected to the company’s SOPHIA (Status Monitoring – Operation Hours Management – Intelligent Automation) cloud system. The loggers will go online eventually to get daily data. The customer uses insights from this data to assess how well the system is working, many hours of pumping the machines do, how many hours of idle time can be reduced through start/stop optimisation? Besides technical insights for engineering, our SOPHIA cloud provides a graphical front-end for the client’s management, helping them to understand their saving opportunities. Besides technical insights for engineering, the SOPHIA cloud provides a graphical front-end for the client’s management, helping them to understand their cost saving opportunities.
Start stop systems and data on the edge
EKU Power Drives’ “Edge Node” will be embedded into every single moving unit, 24/7 monitoring everything the unit does, bringing their own storage” Since these devices are still in development, the team currently work with what we call “Fat Nodes”, Industrial PCs, doing the storage part and using their embedded control devices as a gateway to push data towards the “Fat Nodes”. The downside of this is, that they can’t monitor the unit at all times, but only when it’s connected to a “Fat Node”. They still don’t have 100% coverage with these “Fat Nodes” in all fleets and also can’t ensure every “Fat Node” knows the history of each mobile machine, so we are limited in our machine-history-based optimisation when not having all data on site and WAN connectivity is weak.
Kristian explains that the company aims to do optimisation based on the state of the unit, and to support predictive maintenance. “We want to have a digital twin with the asset to create a model of the system and to predict how the system will be in time.” This is the next step we’re preparing now. Currently, all we do is data acquisition in the field, cache data on the “Fat Node” and send compressed / filtered data points to the cloud where we provide the GUI and reporting. Adding the in-the-field optimisation is one of our goals for 2021.
Connectivity challenges
Felix points out that the machines they provide the start/stop services to are mostly located in remote and hard to reach locations. “They are pumping trucks running fracking pumps and they can be located in oil fields in Texas, North Dakota, Pennsylvania, and Alberta in Southern Canada. They are far from “civilisation” and need to be able to cope with high and low temperatures such as -30c in South Canada. The trucks can also be situated in the desert. 4G may not be there. Often the companies will have satellite connectivity in their control vans but bandwidth is not high.” Therefore, from a strategic standpoint, the company takes a compromise approach to data capture on, and transmission from the edge. Flash memory on large SSD cards in the unit are used to retain data for a detailed view of what is happening in the short period of time. Edge storage is used to track the whole history of what has happened with the machine?
The “Edge Node” devices on each unit will be equipped with enough storage to keep detailed engineering data for multiple weeks. This helps with analysis of failures and critical states afterwards. This data is then used by the digital twin model ON the “Edge Node” to provide numbers to the optimisation and asset management applications. The “Edge Nodes” will push “condensed” data towards the local “Fat Node”, from where it is synced towards the cloud whenever WAN connectivity allows. Examples include how did battery voltage change over time? How do the generator currents change over time and respond to changes in temperature? How did the coolant respond to changes in temperature? Do we need to create indicators of time to failure? Felix continues his strategic approach by saying that the team is looking to push software to the field that can do the analysis and have smart data rather than big data, and not do all the analyses in the cloud.
The team is also looking to save bandwidth for software updates. Edge nodes are mounted to the units / assets, Fat Nodes are located inside the control van. A control van usually controls a fleet of 10-20 units. It could serve as a local cache for software- and configuration updates, so the “Edge Nodes” won’t need to pull these one by one. Besides their own firmware, “Edge Nodes” will be used to update firmware of our embedded control units via CAN bus.
IoT infrastructure
Felix Steinle describes the local IoT infrastructure that is on site. EKU PD builds its own embedded ECUs, and its application software is developed using model-driven design in Matlab/Simulink, Code-Generation and C. Every Simulink ECU as a controller and custom configuration parameters are set for each customer according to their specific requirements. Software updates are done for troubleshooting and just in time delivery of software. Components. Frequent updates and fixes are required. The pain point in software updating is that physical access is needed to update the ECUs. So the machines have to be shut down while the updating operation is performed. This is very costly each time it happens.
OTA software updates from Mender.io would replace access on the field. On a fracking field it is not easy for a technician to just walk to the truck to do the updates. Besides the effort to manually walk to all units, there are restrictions on movement due to worker safety. It would be more efficient to reboot the devices with new software remotely without having to access the field. An update roll back mechanism would also be required because if an update doesn’t work and the device bricks, then the time the truck will be off would be very cost-intensive.
Kristian explains that one of the core ideas behind EKU PD building its own IoT infrastructure was to be able to mitigate connectivity problems by moving “intelligent automation” and “M2M communication” on to the edge, allowing isolated systems to work for longer times with small or even no uplink bandwidth available, while still allowing to give insights via cloud applications. He says “We believe in local networking as a key component in an industrial cloud infrastructure and also want to give customers flexibility in where they keep their data, allowing hybrid public/private cloud architectures and not having to rely on a single cloud provider’s tools and infrastructure.”
Controllers and processors
EKU Power Drives uses Infineon controllers This is the platform that EKU PD’s embedded real-time control systems run on. They currently do some Gateway tasks for data acquisition and relay this data to the “Fat Nodes”, but this will completely be moved to the “Edge Nodes” later. The company has also built its own processor module for the embedded devices, they have embedded controls doing real time control, data acquisition, and industrial PCs that are located in the data truck. These industrial PCs get data from the embedded devices via Ethernet as gateways. The Data acquisition platform and the in- field control platform is combined in the SOPHIA platform. It is Linux based with small embedded edge nodes that will run the Linux operating system packaged with Yocto. while the data acquisition nodes in the field run on the Debian operating system.
The deployment mechanism for the Debian nodes is currently based on FAI which is an open source software stack traditionally used for mass deploying servers in data centers. But here is applied to the Debian installation and patching. But Felix amidst a more natural solution is needed for the embedded ecosystem: “a unified solution for Debian-based machines and the embedded controllers.”
Adding value
The company is helping to operate current machinery more efficiently in order to reduce cost, extend equipment lifetime and reduce the carbon footprint. Felix also sees potential for the company to add value in the mining industry: “Here, you have intermittent loads, hauling trucks bringing material from down in the mine to the processing plants. They have queuing times, electric drives and battery systems, so the engine time could be reduced with an IoT controlled start/stop system in these cases.” Kristian explains that there is additional political pressure to reduce CO 2 emissions, so EKU Power Drives can help keep the older machines running on less engine time and reduce emissions accordingly.
EKU Power Drive’ customers are contractors which deliver well completion services to the energy companies. The energy companies must reduce their CO2 footprint, so they put pressure on their contractors, so they have to limit the CO2 output of their services. EKU provides solutions for the service companies to fulfil the CO2 requirements they get from their customer and allows them to save money on their equipment maintenance at the same time. The company looks forward to growing its device footprint across the energy, mining and shipping sectors and Implementing a OTA software updates will accelerate the efficiency gain process and innovation inside these industries
We wish Kristian, Felix and the EKU Power Drive team well on their journey.
For another riveting article in telematics and transport, follow this link.
